How does Lazy Larry work?
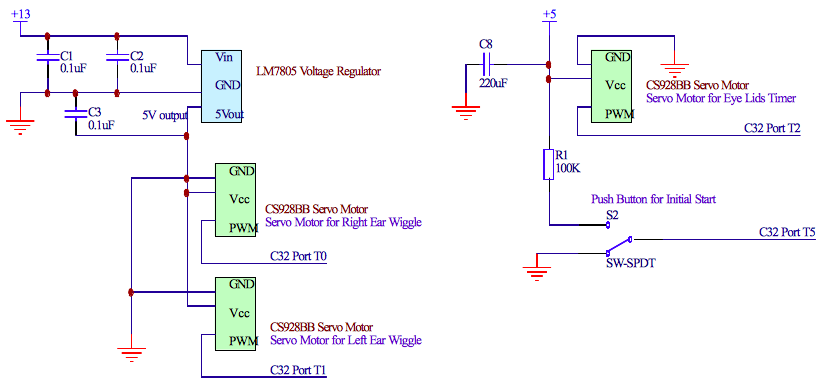
Top Board Schematic
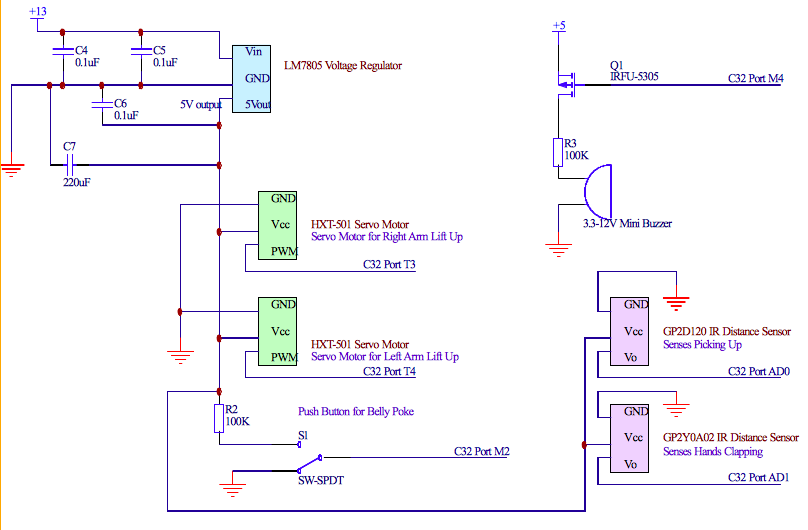
Bottom Board Schematic
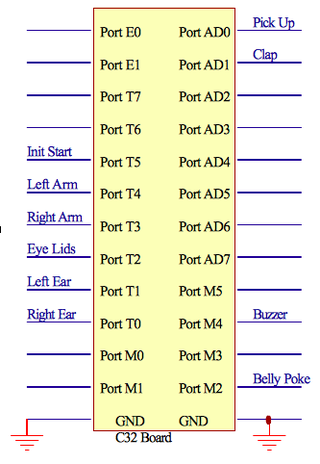
C32 Microcontroller Ports
Larry's Electronic Components
Voltage Regulators
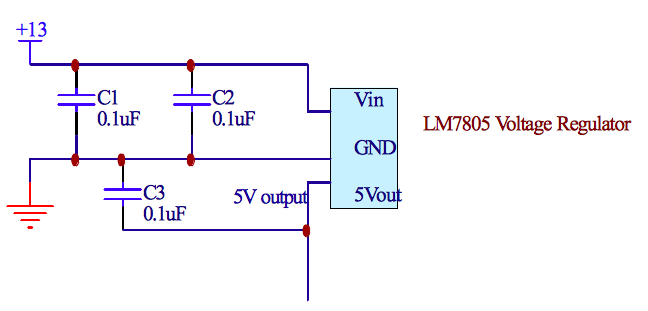
While building Larry, we encountered current spikes with our servo motors. Voltage regulators were used to create additional 5V power sources in order to solve this problem. In doing so, we were able to increase our maximum current draw capacity.
Mechanical Switches
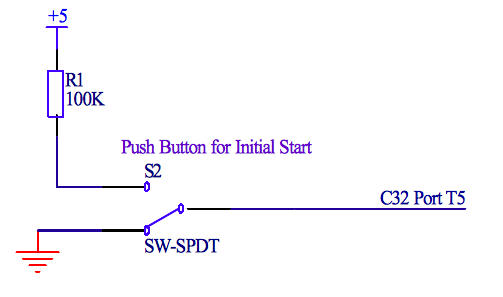
Single Pole, Double Throw mechanical switches were used as our push buttons. These switches were utilized both for the belly poke action and initial start/restart button. We chose them for their ease of use and reliability even when covered with a fabric cover.
Servo Motors
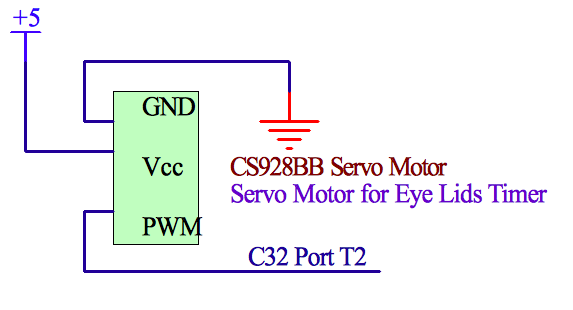
Each "limb" of Larry was actuated using independent servo motors. The need for independent servo motors was due to the fact that each limb had a specific desired range of motion. Additionally, servos allowed us to control the placement of the motor to the accuracy we required for Larry's movement. The specific servos we used, the CS-928BB and HXT-501, were chosen based on availability and maximum torque output.
Infrared Distance Sensors
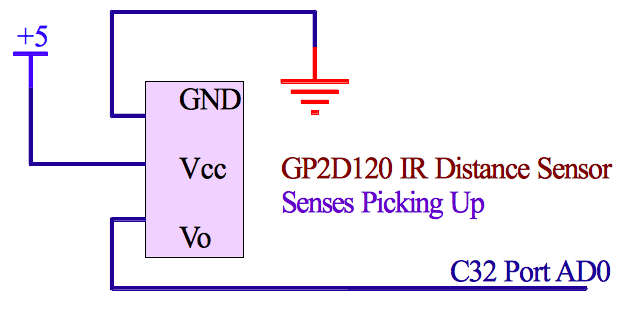
Infrared distance sensors (IRDs) were used to sense when the user is picking up or clapping in front of Larry. Once they were mounted inside the internal structure of Larry, the returned signal was manipulated using code because both of the sensors returned an analog signal to the C32 micro controller. This enabled Larry to give a different outcome for different threshold levels.
Links for Data Sheets
- LM7805 Voltage Regulator: http://www.fairchildsemi.com/ds/LM/LM7805.pdf
- CS-928BB Servo Motor: http://www.hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=10344
- 4-30cm IR Distance Sensor: http://www.sharpsma.com/webfm_send/1205
- 10-80cm IR Distance Sensor: http://www.sharpsma.com/webfm_send/1208
- SS-5GL2 Push Button: http://www.omron.com/ecb/products/pdf/en-ss.pdf
- IRFU-5305 P-channel MOSFET: http://www.datasheetcatalog.org/datasheet/irf/irfr5305.pdf
